Prototype 3
Bottom Layer Mounting
 Bottom Layer Mounting
Bottom Layer Mounting
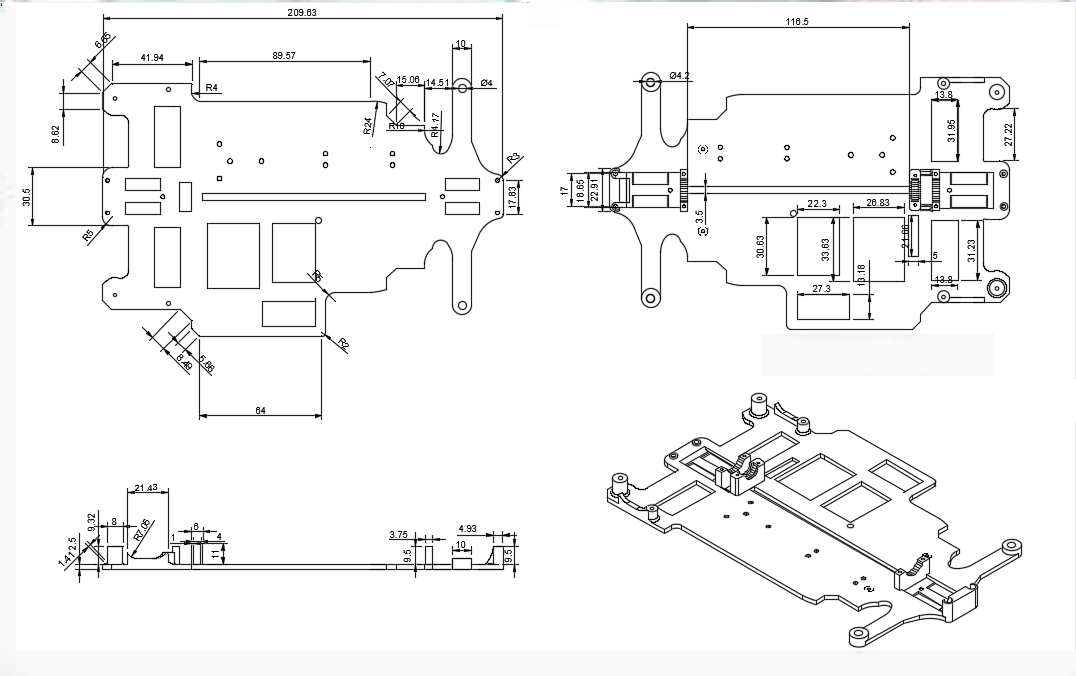
Drastic changes were made to this layer, focusing mainly in modifying the layer's thickness to reduce weight. Also, strategically placed holes were added, their main purpose is to reduce the robot's weight and to ease the assembly process. The entire base was completely custom-made, designed specifically to adapt to the dimensions and requirements from each of the elements that we are using in the robot.
Differential Box Upper Mounting (Thin)
 Differential Box Upper Mounting (Thin)
Differential Box Upper Mounting (Thin)
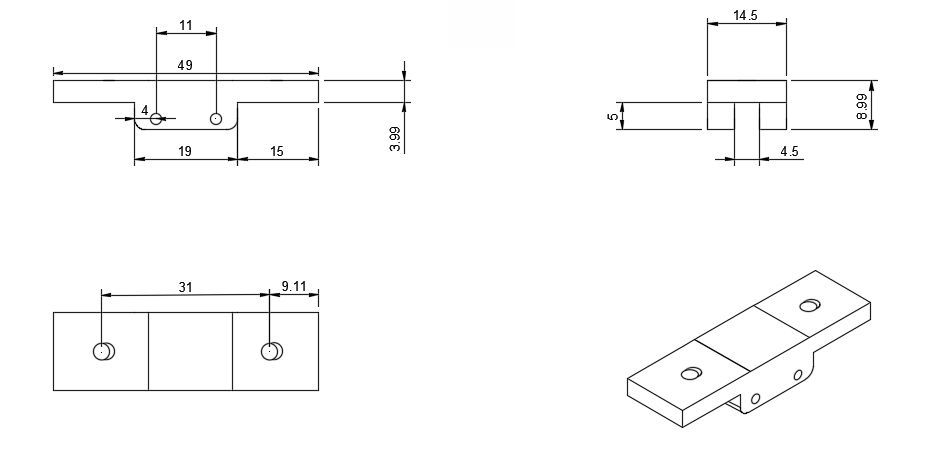
Designed to hold the upper layer firmly, it is screwed on the rear differential box.
Differential Box Upper Mounting (Wide)
 Differential Box Upper Mounting (Wide)
Differential Box Upper Mounting (Wide)
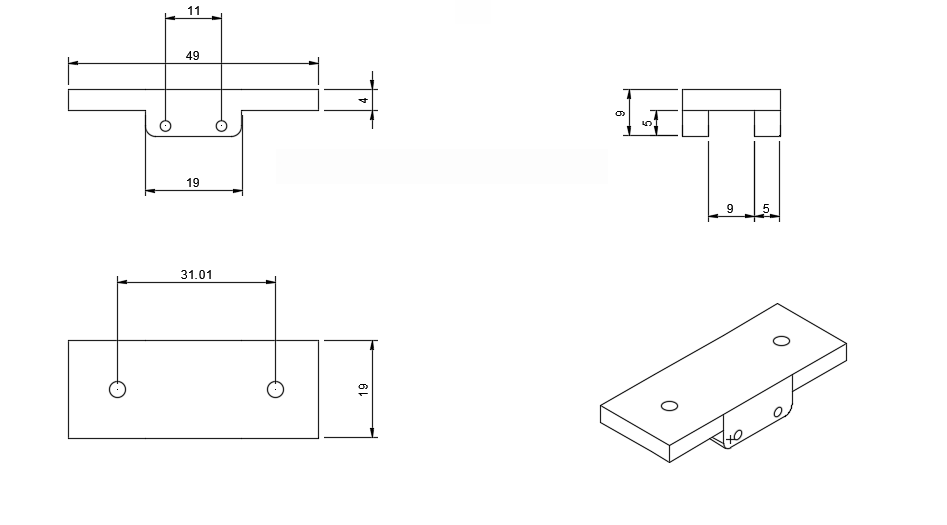
The central gap is wider because it is assembled on the front differential box with the upper knuckle mount. Above it, the RPLiDAR C1 is placed.
Top Layer Mounting
 Top Layer Mounting
Top Layer Mounting
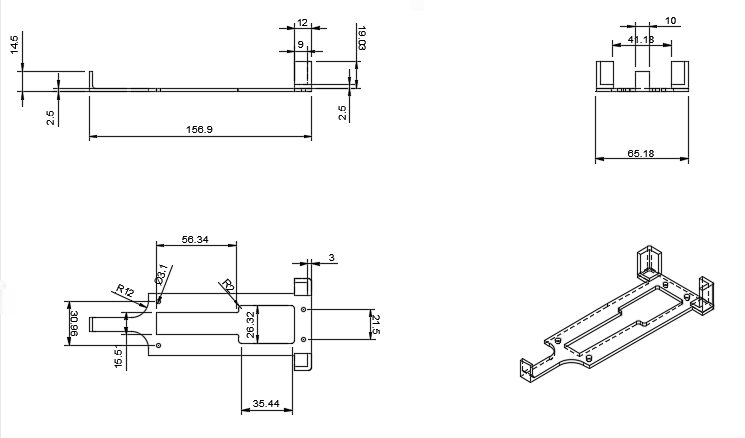
This part has faced a lot of changes when compared to our second prototype's layer. Mainly, we had to reduce its dimensions and weight to make sure Klevor didn't go above the weight limit. On this layer, we placed several important component such as the Shargeek Storm 2 and the Raspberry Pi 5 so the design adapted to provide a safe support and a proper integration for these components.