Prototipo 3
Base de la Capa Inferior
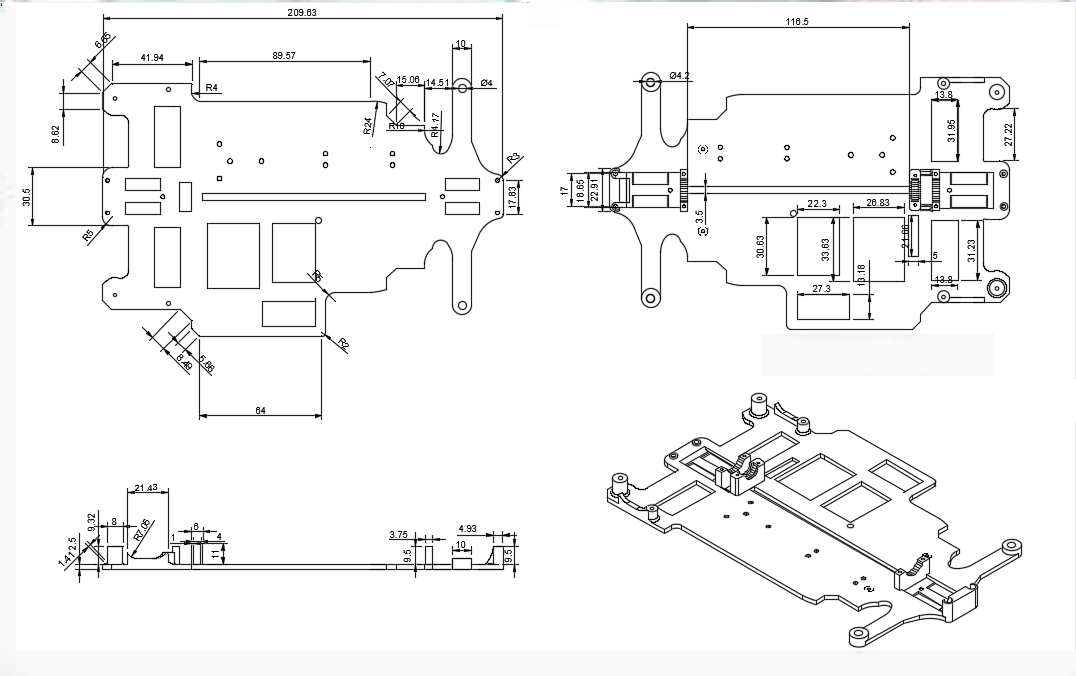 Base de la Capa Inferior
Base de la Capa Inferior
Se realizaron cambios drásticos en este nivel, enfocándonos principalmente en modificar el grosor de la capa para aligerar el peso. Además, se añadieron nuevos huecos estratégicamente ubicados para facilitar el montaje y la integración de los componentes. Toda la base fue fabricada completamente a medida, diseñada específicamente para adaptarse a las dimensiones y requerimientos de los elementos que estamos utilizando en el robot.
Soporte Superior de la Caja del Diferencial (Delgado)
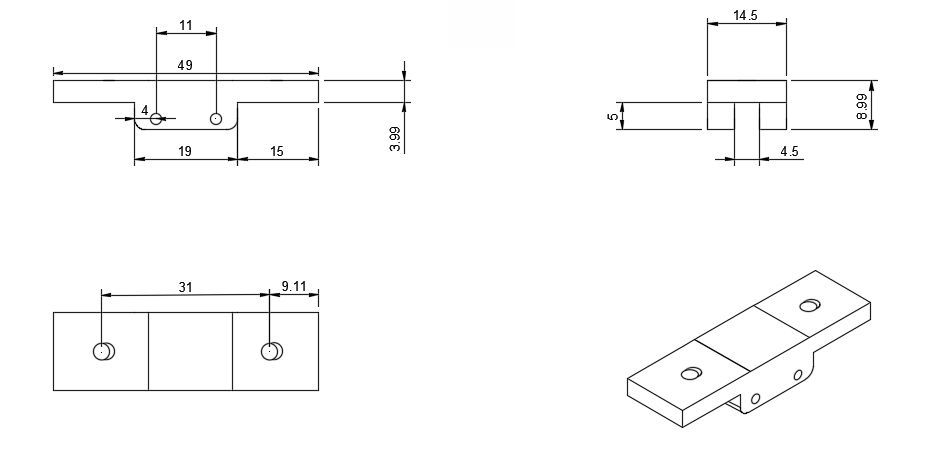 Soporte Superior de la Caja del Diferencial (Delgado)
Soporte Superior de la Caja del Diferencial (Delgado)
Realizado para sostener con total firmeza la capa superior, se ensambla en la caja del diferencial trasera.
Soporte Superior de la Caja del Diferencial (Grueso)
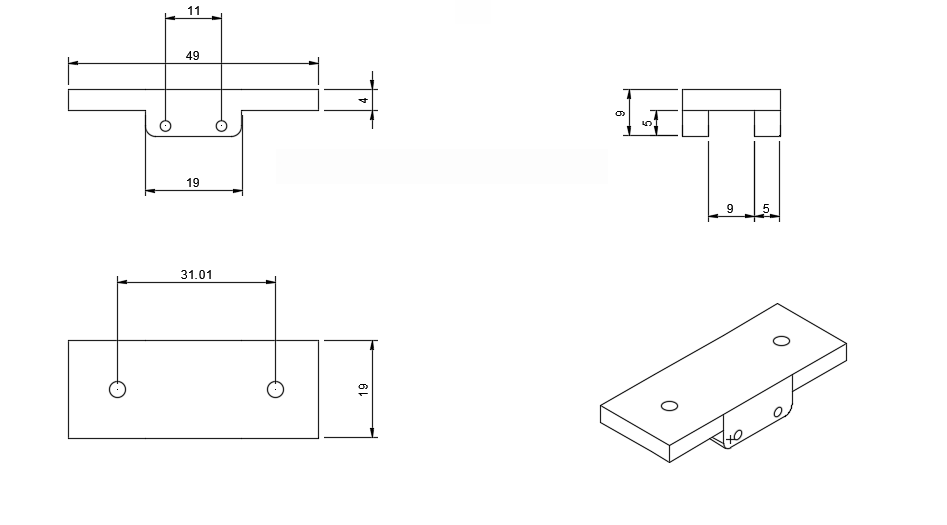 Soporte Superior de la Caja del Diferencial (Grueso)
Soporte Superior de la Caja del Diferencial (Grueso)
El espacio central es más ancho porque se ensambla en la caja del diferencial frontal con el soporte superior de los nudillos. Encima de esta, se ubica nuestro RPLiDAR C1.
Base de la Capa Superior
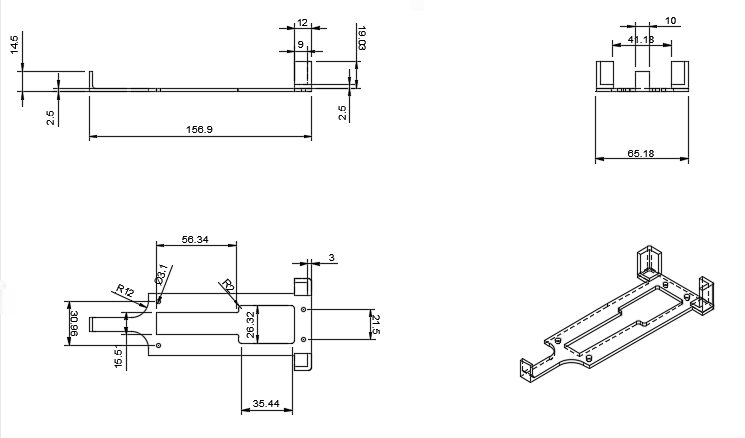 Base de la Capa Superior
Base de la Capa Superior
Esta pieza también ha experimentado muchísimos cambios en comparación con el prototipo 2. Principalmente, tuvimos que reducir sus dimensiones y peso para asegurarnos de que no superen el límite máximo permitido. Sobre esta capa se encuentran ubicados dispositivos clave como la Shargeek Storm 2 y la Raspberry Pi 5 por lo que su diseño se adaptó para brindar soporte seguro y una buena integración de estos importantes componentes.