Prototipo 1
Base de la Capa Inferior
 Base de la Capa Inferior
Base de la Capa Inferior
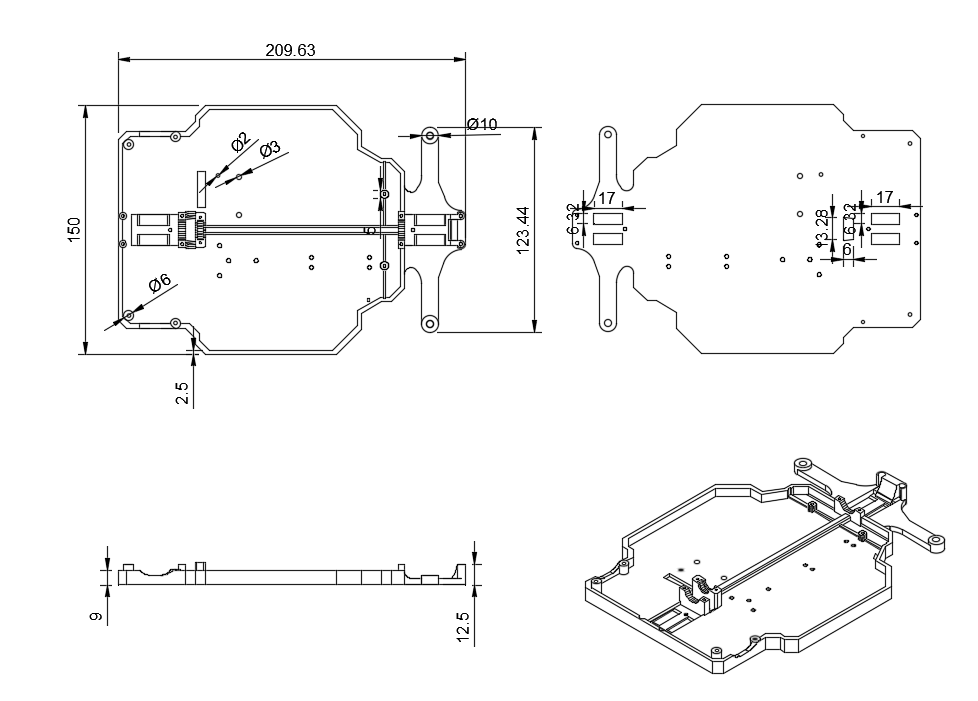
La base de Klevor, el robot, está diseñada especialmente para ensamblar y soportar toda su parte mecánica. Esta estructura principal da un soporte firme, permitiendo un ensamblaje a medida de cada componente.
Soporte Superior de la Caja del Diferencial (Delgado)
 Soporte Superior de la Caja del Diferencial (Delgado)
Soporte Superior de la Caja del Diferencial (Delgado)
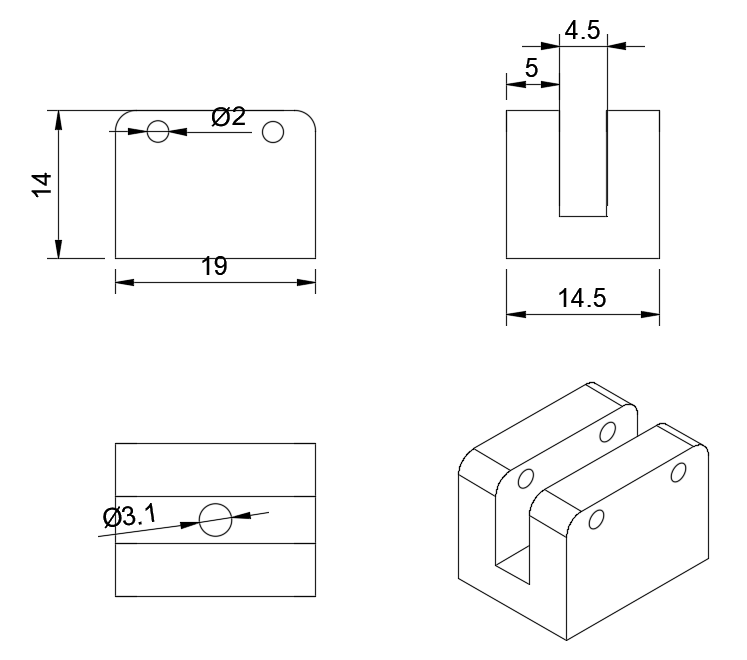
Este soporte se atornilla a la caja del diferencial trasera para sostener el segundo nivel.
Soporte Superior de la Caja del Diferencial (Grueso)
 Soporte Superior de la Caja del Diferencial (Grueso)
Soporte Superior de la Caja del Diferencial (Grueso)
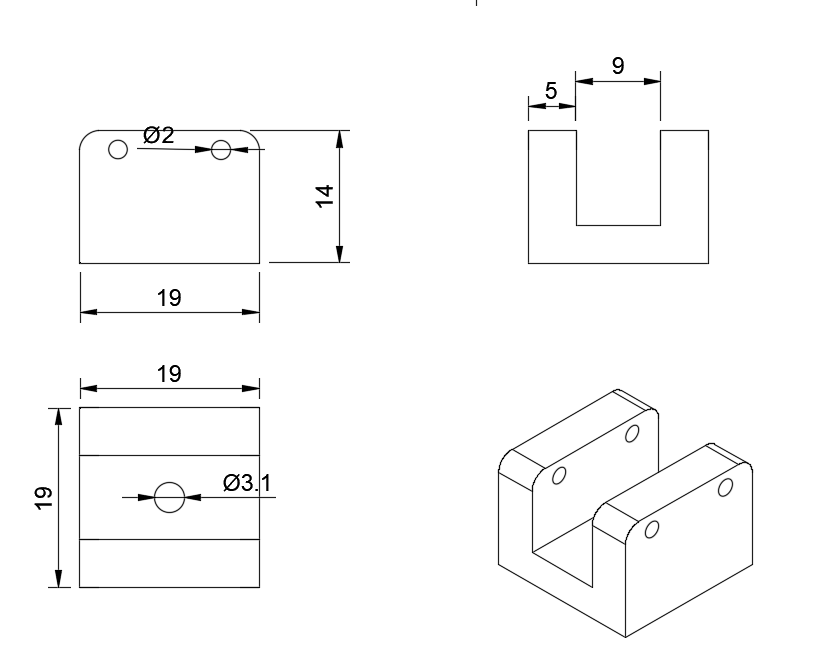
Se conecta a la caja del diferencial frontal, el orificio central es más grande debido a que también se sostiene del agarre superior de las ruedas delanteras.
Base de la Capa Intermedia
 Base de la Capa Intermedia
Base de la Capa Intermedia
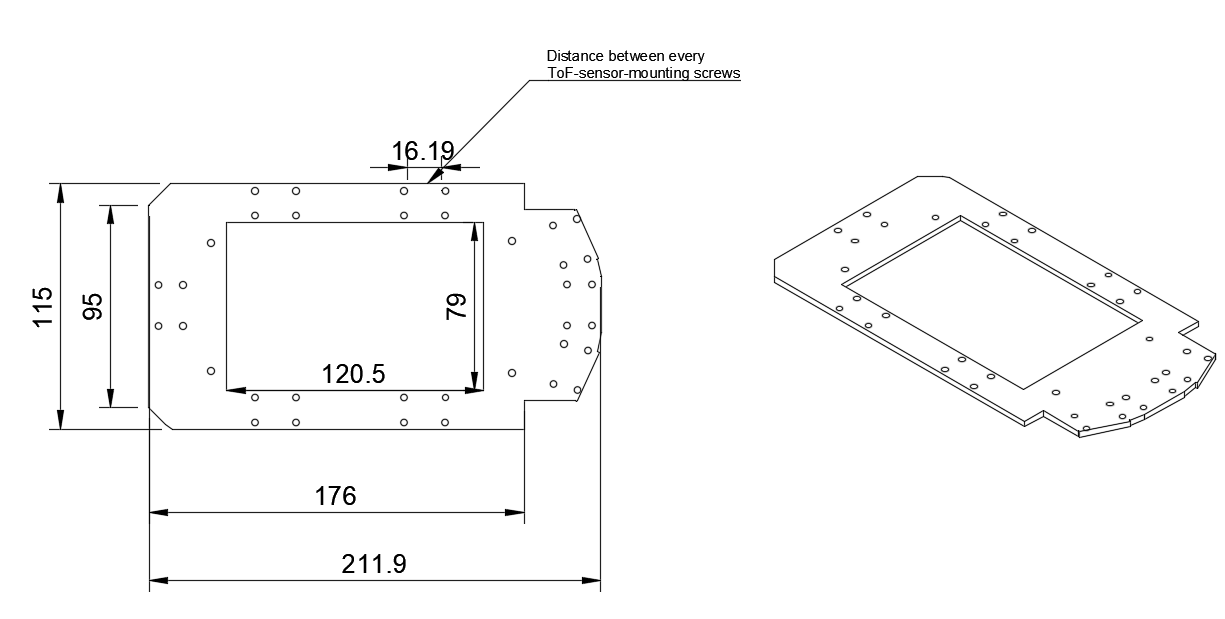
Esta pieza está diseñada específicamente para alojar los sensores ToF, asegurando su correcta posición y funcionamiento, además cuenta con un espacio para colocar un power bank, que utilizaremos de manera provisional para dar energía al robot. Su diseño facilita el ensamblaje ordenado y seguro de estos componentes.
Soporte para Sensor ToF
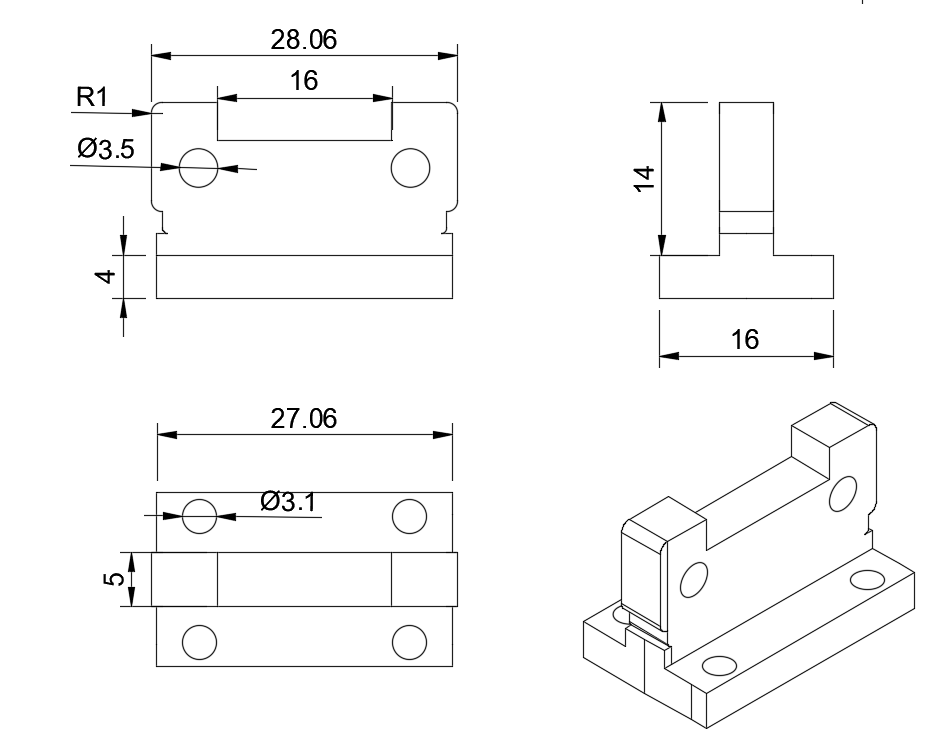 Soporte para Sensor ToF
Soporte para Sensor ToF
Este soporte para el sensor ToF está diseñado de manera meticulosa, con un ángulo específico que permite su buen funcionamiento. El sensor se atornilla en esta base. La base se ensambla directamente a los orificios correspondientes en la capa.
Pilares de la Base de la Capa Superior
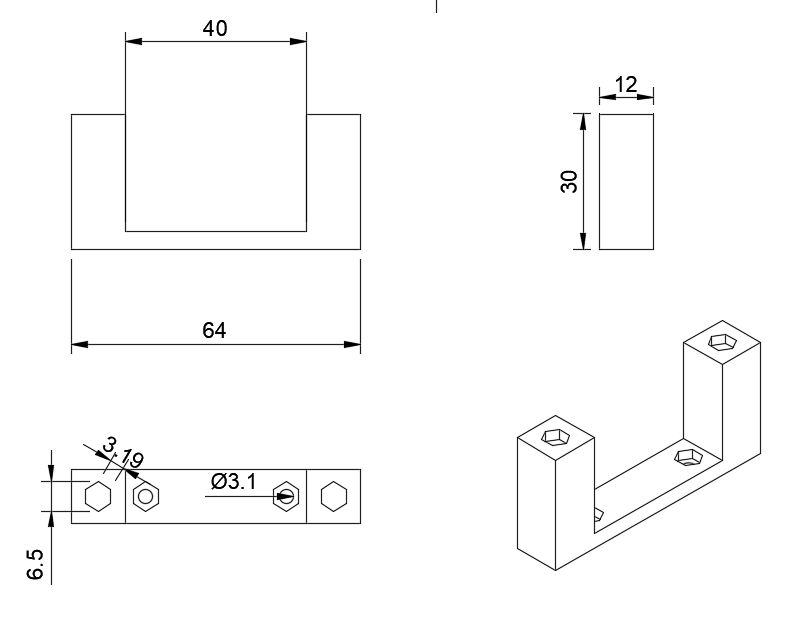 Pilares de la Base de la Capa Superior
Pilares de la Base de la Capa Superior
Esta pieza ha sido diseñada con el fin de sostener la capa superior y hechos para ser ensamblados con tornillos y tuercas, esto para brindarle más resistencia, ya que los componentes de la capa superior no son para nada livianos.
Base de la Capa Superior
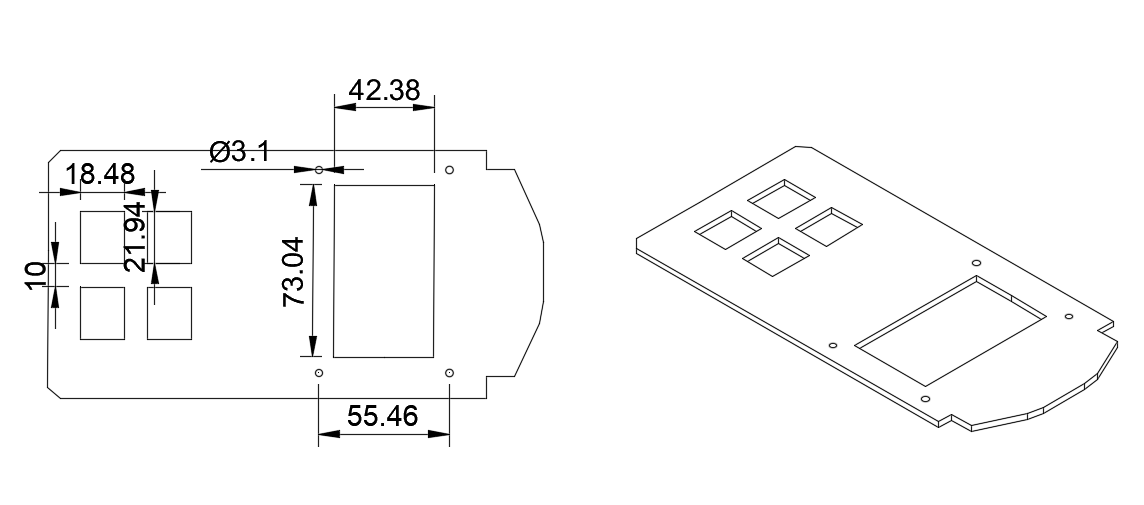 Base de la Capa Superior
Base de la Capa Superior
Diseñada específicamente para colocar el microcontrolador y el soporte de nuestra cámara, manteniendo orificios para que los componentes puedan disipar el calor de manera correcta.