Guía de la Raspberry Pi 5
Instalación de Raspberry Pi OS
Raspberry Pi OS es el sistema operativo oficial para las Raspberry Pi, basado en Debian Linux, y es ampliamente utilizado para proyectos de programación y robótica debido a su facilidad de uso y amplia comunidad de soporte [1]. A continuación, se detallan los pasos para instalarlo en una Raspberry Pi:
- Descargar la imagen de Raspberry Pi OS desde el sitio oficial: Raspberry Pi OS.
- Grabar la imagen en una tarjeta microSD utilizando un software como Balena Etcher o Raspberry Pi Imager.
- Insertar la tarjeta microSD en la Raspberry Pi y encenderla.
- Configurar la Raspberry Pi siguiendo las instrucciones en pantalla, incluyendo la conexión a una red wifi y la creación de un usuario.
- Actualizar el sistema operativo ejecutando los siguientes comandos en la terminal:
bash sudo apt update sudo apt upgrade
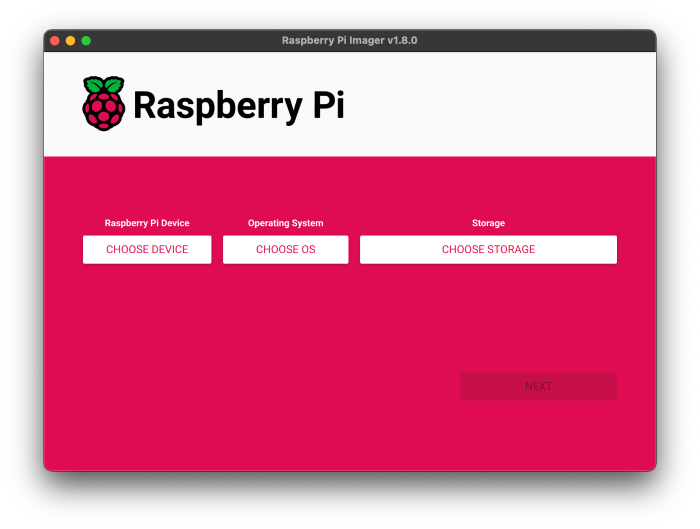 Raspberry Pi Imager
Raspberry Pi Imager
Important
Por experiencia propia, recomendamos la configuración de la aplicación oficial de Raspberry Pi para conexión remota, Raspberry Pi Connect, que permite acceder a la Raspberry Pi desde cualquier lugar y sin necesidad de estar conectado a la misma red wifi [2]. En nuestro caso, en reiteradas ocasiones nos permitió de forma remota, a través del modo Remote Shell, eliminar procesos que han producido un crash o han limitado la repuesta de la Raspberry Pi.
Instalación de la Cámara
 Raspberry Pi Camera Module 3
Raspberry Pi Camera Module 3
Para instalar la cámara en la Raspberry Pi, se debe seguir los siguientes pasos. Cabe destacar que la cámara utilizada en este proyecto es la Raspberry Pi Camera Module 3 Wide, que es compatible con la Raspberry Pi 5 y permite capturar imágenes y videos de alta calidad [3].
- Conectar la cámara a la Raspberry Pi utilizando el conector CSI.
- Probar el correcto funcionamiento de la cámara ejecutando el siguiente comando en la terminal:
bash libcamera-hello - Si la cámara funciona correctamente, se mostrará una vista previa de la cámara en la pantalla por unos segundos.
Important
En caso de estar interesado en adquirir algún tipo de Raspberry Pi Camera, se debe comprar un cable aparte dependiendo del proveedor, ya que normalmente estas vienen con el cable para la Raspberry Pi 4, el cual no es el mismo.
Instalación de Raspberry Pi AI HAT+
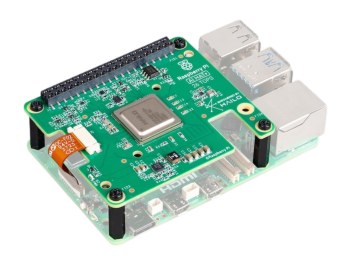 Raspberry Pi AI HAT+ 26 TOPS
Raspberry Pi AI HAT+ 26 TOPS
Para la instalación, empleamos las dos guías de la documentación oficial de Raspberry Pi, donde se explica cómo instalar el Hailo AI HAT+ [4] y cómo instalar el software necesario para su funcionamiento [5].
- Verificamos que la Raspberry Pi 5 esté actualizada, sino la actualizamos con el siguiente comando:
bash sudo apt update && sudo apt full-upgade - Revisamos la versión actual del firmware instalado en la Raspberry Pi con el siguiente comando:
bash sudo rpi-eeprom-update- Si dicho comando imprime una fecha anterior al 6 de diciembre de 2023, entonces debemos actualizar el firmware de la Raspberry Pi 5. Para ello, ejecutamos el siguiente comando:
bash sudo raspi-config - En el menú de configuración, seleccionamos la opción
Advanced Optionsy luegoBootloader Version. Elegimos la opciónLatesty salimos del menú de configuración.
- Si dicho comando imprime una fecha anterior al 6 de diciembre de 2023, entonces debemos actualizar el firmware de la Raspberry Pi 5. Para ello, ejecutamos el siguiente comando:
- Ejecutamos el siguiente comando para actualizar el firmware:
bash sudo rpi-eeprom-update -a - Reiniciamos la Raspberry Pi 5 con el siguiente comando:
bash sudo reboot - Desconectamos la Raspberry Pi 5 de la corriente y desconectamos todos los dispositivos conectados a ella.
- Instalamos los espaciadores de la Raspberry Pi 5 utilizando los cuatro tornillos proporcionados. Presionamos firmemente el conector GPIO apilado sobre los pines GPIO de la Raspberry Pi. Desconectamos el cable plano de la AI HAT+ y conectamos el otro extremo al puerto PCIe de la Raspberry Pi. Levantamos el soporte del cable plano desde ambos lados, luego insertamos el cable con los puntos de contacto de cobre hacia adentro, hacia los puertos USB. Con el cable plano completamente insertado en el puerto PCIe, empujamos el soporte del cable hacia abajo desde ambos lados para asegurar el cable plano firmemente en su lugar.
- Colocamos la AI HAT+ sobre los espaciadores y utilizamos los cuatro tornillos restantes para asegurarla en su lugar.
- Conectamos el cable plano a la AI HAT+ y lo aseguramos en su lugar. Para ello, levantamos el soporte del cable plano desde ambos lados, luego insertamos el cable con los puntos de contacto de cobre hacia arriba. Con el cable plano completamente insertado en el puerto PCIe, empujamos el soporte del cable hacia abajo desde ambos lados para asegurar el cable plano firmemente en su lugar.
- Conectamos la Raspberry Pi 5 a la corriente y encendemos el dispositivo.
- Para habilitar velocidades PCIe Gen 3.0 [6], ejecutamos el siguiente comando:
bash sudo raspi-config- En el menú de configuración, seleccionamos la opción
Advanced Optionsy luegoPCIe Speed. Elegimos la opción
Yespara habilitar el modo PCIe Gen 3.0. - Reiniciamos la Raspberry Pi 5.
- En el menú de configuración, seleccionamos la opción
- Instalamos las dependencias requeridas para usar el NPU. Ejecutamos el siguiente comando desde una ventana de terminal:
bash sudo apt install hailo-all
Cabe destacar que, debido a que la última actualización (4.21.0) es muy reciente, recomendamos instalar la versión anterior que es con la que hemos podido trabajar y comprobar su correcto funcionamiento, para lo cual, en vez del anterior comando, sería:
bash sudo apt install hailo-all=4.20.0
Esto instalará las siguientes dependencias:- Controlador de dispositivo del kernel Hailo y firmware
- Software de middleware HailoRT
- Bibliotecas de postprocesamiento central Tappas de Hailo
- Etapas de software de demostración de postprocesamiento rpicam-apps Hailo
- Finalmente, reiniciamos la Raspberry Pi de nuevo para que estos ajustes tengan efecto.
- Para verificar que el NPU está correctamente instalado y funcionando, ejecutamos el siguiente comando:
bash hailortcli fw-control identify
Si el NPU está correctamente instalado, deberíamos ver un mensaje similar al siguiente:
bash Executing on device: 0001:01:00.0 Identifying board Control Protocol Version: 2 Firmware Version: 4.20.0 (release,app,extended context switch buffer) Logger Version: 0 Board Name: Hailo-8 Device Architecture: HAILO8 Serial Number: <N/A> Part Number: <N/A> Product Name: <N/A>
Configuración de la Raspberry Pi
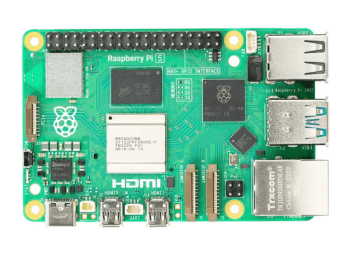 Raspberry Pi 5
Raspberry Pi 5
Para configurar la Raspberry Pi, primero conectamos la Raspberry Pi a un monitor, teclado y ratón.
Luego, encendemos la Raspberry Pi y esperar a que se inicie el sistema operativo.
Después, abrimos una terminal y ejecutar el siguiente comando para actualizar el sistema operativo:
sudo apt update && sudo apt upgrade -y
Clonamos el repositorio en el caso de que no se haya realizado aún. Puedes ver las distintas formas de clonar el repositorio en la sección referente al GitHub.
Navegamos al directorio del repositorio clonado, en el caso de haberlo clonado en la carpeta de Documentos, el comando sería:
cd ~/Documents/klevor
Cambiamos el directorio actual a devices/raspberry_pi_5 para acceder al código específico de la Raspberry Pi 5:
cd devices/raspberry_pi_5
Configuramos el entorno virtual de Python. Para ello, ejecuta el siguiente comando:
- Si el sistema operativo es Windows:
cmd python -m venv .venv .\.venv\Scripts\activate - Si el sistema operativo es Linux o macOS:
bash python3 -m venv .venv source .venv/bin/activate
Instalamos las dependencias necesarias para el proyecto ejecutando el siguiente comando:
pip install -r requirements.txt
En el caso de no tener configurado la Raspberry Pi Pico 2 W, se recomienda seguir su respectiva guía de configuración para poder utilizarla como controlador del robot. Al igual que, en el caso de no haber generado el modelo para la detección de obstáculos, se recomienda seguir la guía de configuración del modelo para poder utilizarlo con la Raspberry Pi 5.
Configurar el Startup Service
Para que el robot se inicie automáticamente al encender la Raspberry Pi, es necesario configurar un servicio de inicio.
Para ello, nos aseguramos primero de que el script de Shell run.sh sea ejecutable, para lo cual ejecutamos el siguiente comando:
chmod +x run.sh
Note
Necesitamos estar en el directorio devices/raspberry_pi_5 para que el comando anterior funcione correctamente.
Posteriormente, creamos un archivo de servicio en el directorio /etc/systemd/system/ con el nombre klevor.service con el siguiente comando:
sudo nano /etc/systemd/system/klevor.service
En el editor de texto, pegamos el siguiente contenido:
[Unit]
Description=Klevor Startup Service
After=multi-user.target
[Service]
User=pi
ExecStart=/home/pi/Documents/klevor/devices/raspberry_pi_5/run.sh
WorkingDirectory=/home/pi/Documents/klevor/devices/raspberry_pi_5
StandardOutput=inherit
StandardError=inherit
Restart=on-failure
[Install]
WantedBy=multi-user.target
Note
Reemplazamos user por el nombre de usuario de la Raspberry Pi, que por defecto es pi. Así mismo, reemplazamos /home/pi/Documents/klevor/devices/raspberry_pi_5/run.sh con la ruta completa al script run.sh que se encuentra en el directorio del repositorio clonado. De igual forma, ajustamos la ruta del WorkingDirectory al directorio donde se encuentra el script run.sh.
Guardamos los cambios y salimos del editor de texto (en nano, presionamos Ctrl + X, luego Y para confirmar los cambios y finalmente Enter).
Luego, recargamos los servicios del sistema con el siguiente comando:
sudo systemctl daemon-reload
Finalmente, habilitamos el servicio para que se inicie automáticamente al arrancar la Raspberry Pi con el siguiente comando:
sudo systemctl enable klevor.service
Note
Si en algún momento necesitas detener el servicio, puedes hacerlo con el siguiente comando:
bash
sudo systemctl stop klevor.service
Reiniciamos la Raspberry Pi para que los cambios surtan efecto. A partir de ahora, el robot se iniciará automáticamente al encender la Raspberry Pi.
Important
Por la lógica del código, el robot no se moverá hasta que sea pulsado el botón o switch de encendido, como se indica en el diagrama de conexiones del robot. Esto es para evitar que el robot se mueva accidentalmente al encender la Raspberry Pi. Puedes ver el diagrama de conexiones en la sección de Electrónica.
Important
En el caso de que creas que el robot no se haya iniciado correctamente, puedes revisar el estado del servicio con el siguiente comando:
bash
sudo systemctl status klevor.service
Así mismo, puedes ejecutar el código directamente sin necesidad de configurar el servicio de inicio, para lo cual, simplemente ejecuta el siguiente comando:
bash
run.sh
Esto iniciará el robot y podrás ver los mensajes de depuración en la terminal. Si todo funciona correctamente, deberías ver mensajes indicando que el robot está listo para recibir comandos.
Si deseas detener el robot, puedes presionar Ctrl + C en la terminal donde se está ejecutando el script run.sh.
Referencias
-
Raspberry Pi OS. (2025). Raspberry Pi. https://www.raspberrypi.com/software/
-
Raspberry Pi Connect. (2025). Raspberry Pi. https://www.raspberrypi.com/documentation/remote-access/raspberry-pi-connect.html
-
Camera. (2025). Raspberry Pi. https://www.raspberrypi.com/documentation/computers/camera.html
-
AI Kit and AI HAT+ software. (2025). Raspberry Pi. https://www.raspberrypi.com/documentation/computers/ai.html#getting-started
-
AI Hat+. (2025). Raspberry Pi. https://www.raspberrypi.com/documentation/accessories/ai-hat-plus.html#ai-hat-plus
-
Raspberry Pi. (2025). Raspberry Pi. https://www.raspberrypi.com/documentation/computers/raspberry-pi.html